The second-class lever is another example of a simple machine comprising a beam placed upon a fulcrum. In the second-class lever, the orientation and distribution of forces are different than in the first-class lever: The load is placed between the fulcrum and effort, while the force of the effort is directed in an opposite direction to counter that of the load.
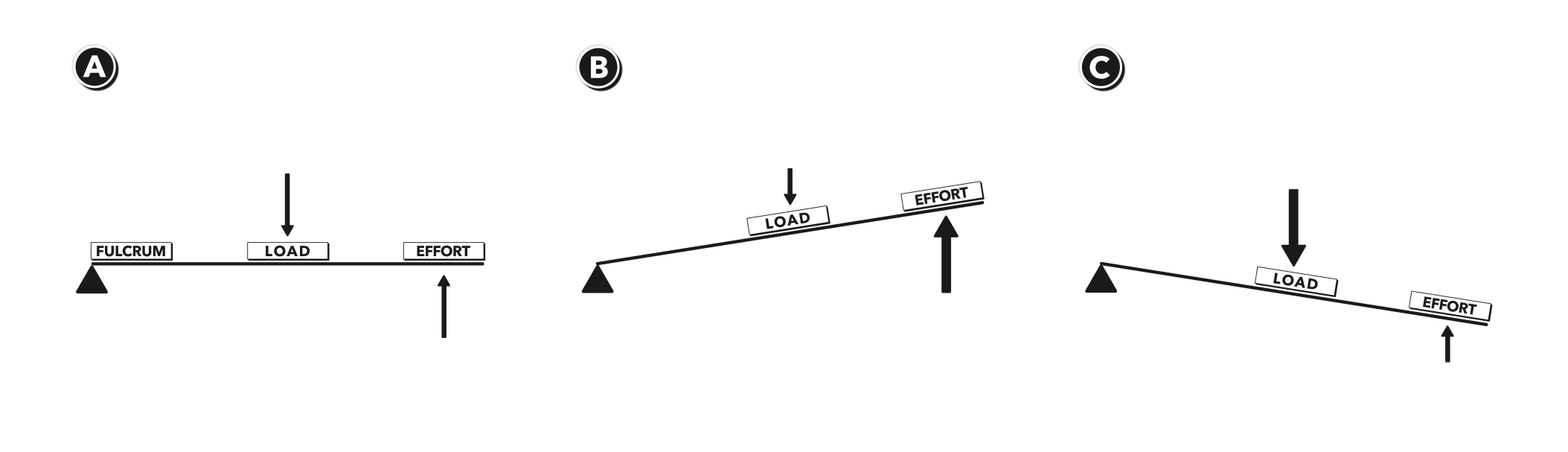
Figure 1
If the moments of the effort and load are equal, then the system is in equilibrium: No movement occurs (Figure 1A). If the effort contributes a greater moment than the load, the beam will pivot in the direction of the effort (Figure 1B). If the load contributes a greater moment than the effort, the beam will pivot in the direction of the force of the load (Figure 1C).
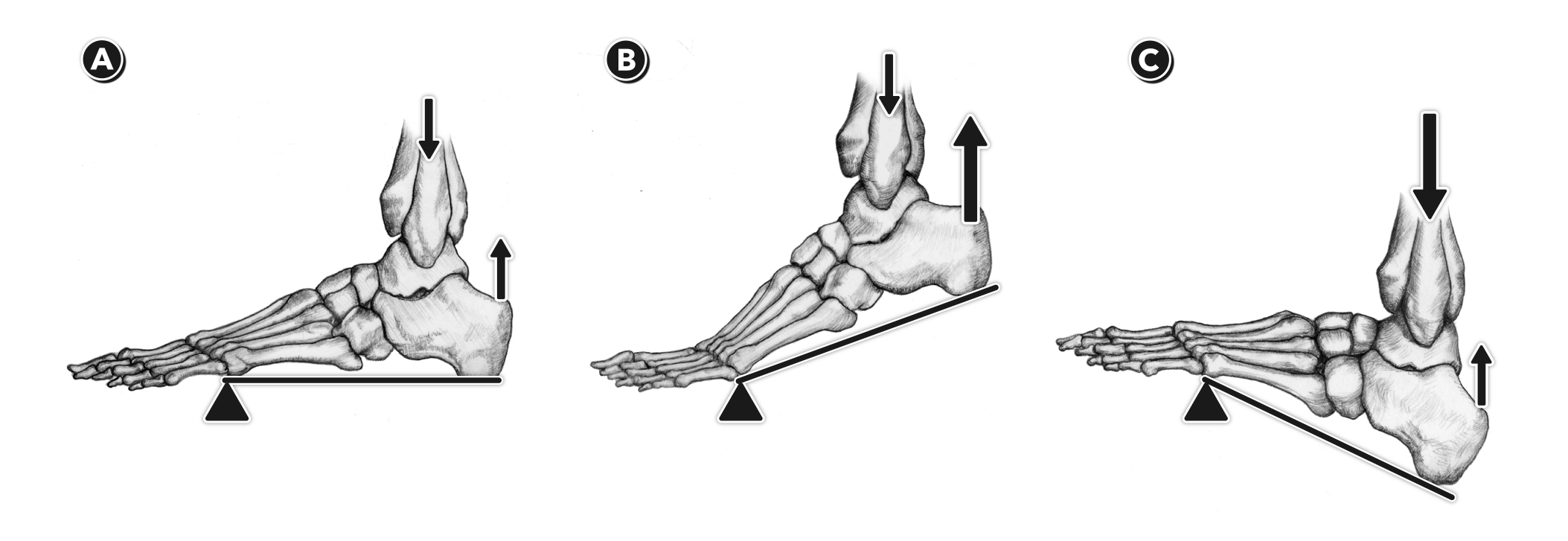
Figure 2
One of the most commonly used examples of second-class levers in human anatomy is the foot as we stand flat-footed, then elevate our heels. In this anatomical example of a simple machine, when the muscular effort expended using the calf musculature is equal to the amount of load on the foot, the system is in equilibrium and the heel stays in contact with the floor (Figure 2A). If the muscular force generated by the posterior musculature is greater than the load on the foot—the body and any weight it carries—the heel will rise from the floor (Figure 2B). If the muscular force generated by the posterior musculature is less than the supported load, the heel will move downward if there is no floor under it (Figure 2C).
It should be understood that the first-class lever at the ankle (as described in a previous installment) is still present and functional as the second-class lever operates. This first-class lever operates to maintain verticality of the tibia and fibula (shin) as the heel rises or descends. The human body is a composite of many operant lever systems acting in isolation or in concert with others to move us effectively. Changes in our interactions with the Earth and equipment will also change the functioning of these levers.